Changement de référentiels
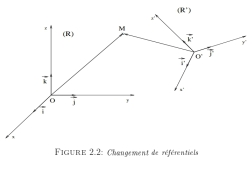
Soit à étudier le mouvement d'une particule \(M\) par rapport à un repère fixe \(R\), appelé repère absolu. Il est parfois intéressant d'introduire un second repère \(R'\) dit repère relatif, par rapport auquel le mouvement de \(M\) soit plus simple à étudier. Le repère relatif \(R'\) est en mouvement de translation et/ou de rotation par rapport au repère absolu \(R\) avec la vitesse de rotation \(\vec{\Omega}\). La particule \(M\) est repéré par son vecteur-position \(\overrightarrow{OM}\) dans \(R\) et par son vecteur-vitesse \(\overrightarrow{O'M}\) dans \(R'\) (Figure 2.2).
Les dérivées par rapport au temps, des vecteurs de base de R' sont données par :
\(\bullet\) Dans \(R\),
\(\dfrac{d\vec{i'}}{dt}\arrowvert_{R}=\vec{\Omega}\wedge\vec{i'}\;\; ; \;\;\dfrac{d\vec{j'}}{dt}\arrowvert_{R}=\vec{\Omega}\wedge\vec{j'}\,\, ;\;\;\dfrac{d\vec{k'}}{dt}\arrowvert_{R}=\vec{\Omega}\wedge\vec{k'}\)
\(\bullet\) Dans \(R'\),
\(\dfrac{d\vec{i'}}{dt}\arrowvert_{R'}=\dfrac{d\vec{j'}}{dt}\arrowvert_{R'}=\dfrac{d\vec{k'}}{dt}\arrowvert_{R'}=0\)
La dérivée par rapport au temps, dans \(R\), d'un vecteur \(\vec{A}=x'\vec{i'}+y'\vec{j'}+z'\vec{k'}\) de \(R'\) s'écrit :
\(\dfrac{d\vec{A}}{dt}\arrowvert_{R}=\dot{x}'\vec{i}'+x'\dfrac{d\vec{i}'}{dt}\arrowvert_{R}+\dot{y}'\vec{j}'+y'\dfrac{d\vec{j}'}{dt}\arrowvert_{R}+\dot{z}'\vec{k}'+z'\dfrac{d\vec{k}'}{dt}\arrowvert_{R}=\dot{x}'\vec{i}'+\dot{y}'\vec{j}'+\dot{z}'\vec{k}'+x'\vec{\Omega}\wedge\vec{i}'+y'\vec{\Omega}\wedge\vec{j}'+z'\vec{\Omega}\wedge\vec{k}'\)
\(\dfrac{d\vec{A}}{dt}\arrowvert_{R}=\dot{x}'\vec{i}'+\dot{y}'\vec{j}'+\dot{z}'\vec{k}')+\vec{\Omega}\wedge(x'\vec{i'}+y'\vec{j'}+z'\vec{k'})\dfrac{d\vec{A}}{dt}\arrowvert_{R}=\dfrac{d\vec{A}}{dt}\arrowvert_{R'}+\vec{\Omega}\wedge\vec{A}.\)
Composition des vitesses
La vitesse du mobile \(M\) dans le repère fixe \(R\) est sa vitesse absolue \(\vec{V}_{a}\) :
\(\vec{V}_{a}=\dfrac{d\overrightarrow{OM}}{dt}\arrowvert_{R}.\)
La vitesse du mobile \(M\) dans le repère mobile \(R'\) est sa vitesse relative \(\vec{V}_{r}\) :
\(\vec{V}_{r}=\dfrac{d\overrightarrow{O'M}}{dt}\arrowvert_{R'}\).
En écrivant que \(\overrightarrow{OM}=\overrightarrow{OO'}+\overrightarrow{O'M}\) et en utilisant la formule \((2.41)\) nous obtenons :
\(\vec{V}_{a}=\dfrac{d\overrightarrow{OM}}{dt}\arrowvert_{R}=\dfrac{d\overrightarrow{OO'}}{dt}\mid_{R}+\dfrac{d\overrightarrow{O'M}}{dt}\mid_{R}=\dfrac{d\overrightarrow{OO'}}{dt}\mid_{R}+\dfrac{d\overrightarrow{O'M}}{dt}\mid_{R'}+\vec{\Omega}\wedge\overrightarrow{O'M}\vec{V}_{a}\)
\(\vec{V}_{a}=\dfrac{d\overrightarrow{OM}}{dt}\arrowvert_{R}=\vec{V}_{r}+\dfrac{d\overrightarrow{OO'}}{dt}\mid_{R}+\vec{\Omega}\wedge\overrightarrow{O'M}\).
L'expression
\(\vec{V}_{e}=\dfrac{d\overrightarrow{OO'}}{dt}\mid_{R}+\vec{\Omega}\wedge\overrightarrow{O'M},\)
est appelé vitesse d'entraînement du mobile M. vitesse d'entraînement de M est la vitesse absolue du point (imaginaire) qui coïncide avec \(M\) à l'instant \(t\) et supposé fixe dans le repère \(R'\). On peut aussi noter la vitesse d'entraînement de \(M\) comme suit,
\(\vec{V}_{e}=\dfrac{d\overrightarrow{OM}}{dt}\arrowvert_{R}\;\;\;\mbox{(M fixe dans R')}\)
La loi de composition des vitesses en mécanique classique peut donc s'écrire :
\(\vec{V}_{a}=\vec{V}_{r}+\vec{V}_{e}\)
Composition des accélérations.
L'accélération du mobile dans le référentiel fixe R est son accélération absolue \(\vec{a}_{a}\) :
\(\vec{a}_{a}=\dfrac{d^{2}\overrightarrow{OM}}{dt^{2}}\arrowvert_{R}=\dfrac{d\vec{V}_{a}}{dt}\arrowvert_{R}.\)
L'accélération du mobile dans le référentiel mobile \(R'\) est son accélération relative \(\vec{a}_{r}\) :
\(\vec{a}_{r}=\dfrac{d^{2}\overrightarrow{O'M}}{dt^{2}}\arrowvert_{R'}=\dfrac{d\vec{V}_{r}}{dt}\arrowvert_{R'}.\)
En utilisant la loi de composition des vitesses de l'expression \((2.44)\) nous obtenons :
\(\vec{a}_{a}=\dfrac{d\vec{V}_{a}}{dt}\arrowvert_{R}=\dfrac{d\vec{V}_{r}}{dt}\arrowvert_{R}+\dfrac{d}{dt}\left[ \dfrac{d\overrightarrow{O'O}}{dt}\mid_{R}+\vec{\Omega}\wedge\overrightarrow{O'M}\right]\).
Le développement de la formule \((2.50)\) donne :
\(\dfrac{d\vec{V}_{r}}{dt}\arrowvert_{R}=\dfrac{d\vec{V}_{r}}{dt}\arrowvert_{R'}+\vec{\Omega}\wedge\vec{V}_{r}=\vec{a}_{r}+\vec{\Omega}\wedge\vec{V}_{r}\)
\(\dfrac{d}{dt}(\vec{\Omega}\wedge\overrightarrow{O'M})\mid_{R}=\dfrac{d\vec{\Omega}}{dt}\wedge\overrightarrow{O'M}+\vec{\Omega}\wedge\dfrac{d\overrightarrow{O'M}}{dt}\mid_{R}=\dfrac{d\vec{\Omega}}{dt}\wedge\overrightarrow{O'M}+\vec{\Omega}\wedge\left( \dfrac{d\overrightarrow{O'M}}{dt}\mid_{R'}+\vec{\Omega}\wedge\overrightarrow{O'M}\right)\)
\(\dfrac{d}{dt}(\vec{\Omega}\wedge\overrightarrow{O'M})\mid_{R}=\dfrac{d\vec{\Omega}}{dt}\wedge\overrightarrow{O'M}+\vec{\Omega}\wedge\vec{V}_{r}+\vec{\Omega}\wedge(\vec{\Omega}\wedge\overrightarrow{O'M})\).
Remplaçons les expressions \((2.51) et (2.52)\) dans \((2.50)\) nous obtenons :
\(\vec{a}_{a}=\vec{a}_{r}+\dfrac{d^{2}\overrightarrow{OO'}}{dt^{2}}\mid_{R}+\dfrac{d\vec{\Omega}}{dt}\wedge\overrightarrow{O'M}+\vec{\Omega}\wedge(\vec{\Omega}\wedge\overrightarrow{O'M})+2\vec{\Omega}\wedge\vec{V}_{r}\).
En posant
\(\vec{a}_{e}=\vec{a}_{r}+\dfrac{d^{2}\overrightarrow{OO'}}{dt^{2}}\mid_{R}+\dfrac{d\vec{\Omega}}{dt}\wedge\overrightarrow{O'M}+\vec{\Omega}\wedge(\vec{\Omega}\wedge\overrightarrow{O'M})\vec{a}_{c}=2\vec{\Omega}\wedge\vec{V}_{r}\),
la loi de composition des accélérations en mécanique classique s'écrit :
\(\vec{a}_{a}=\vec{a}_{r}+\vec{a}_{e}+\vec{a}_{c}\).
\(\vec{a}_{e}\) désigne l'accélération d'entraînement et \(\vec{a}_{c}\) est l'accélération de Coriolis ou complémentaire.
Cas particulier.
Si le repère \(R'\) est uniquement en translation par rapport à \(R\) alors \(\vec{\Omega}=0\), dans ce cas nous avons : \(\vec{V}_{a}(M)=\vec{V}_{r}(M)+\vec{V}_{a}(O')\;\;\mbox{et}\;\;\vec{a}_{a}(M)=\vec{a}_{r}(M)+\vec{a}_{a}(O')\).
Si de plus, \(R'\) est en translation uniforme par rapport à \(R\) alors
\(\vec{V}_{a}(O')=\overrightarrow{cte}\;\;\mbox{et}\;\;\vec{a}_{a}(M)=\vec{a}_{r}(M).\)